تطوير الأداء الديناميكي لأنظمة قيادة المحركات التحريضية ذات اقفص السنجابي التي تعمل وفق مبدأ التحكم السلمي (volts/hertz = constant).
الملخص
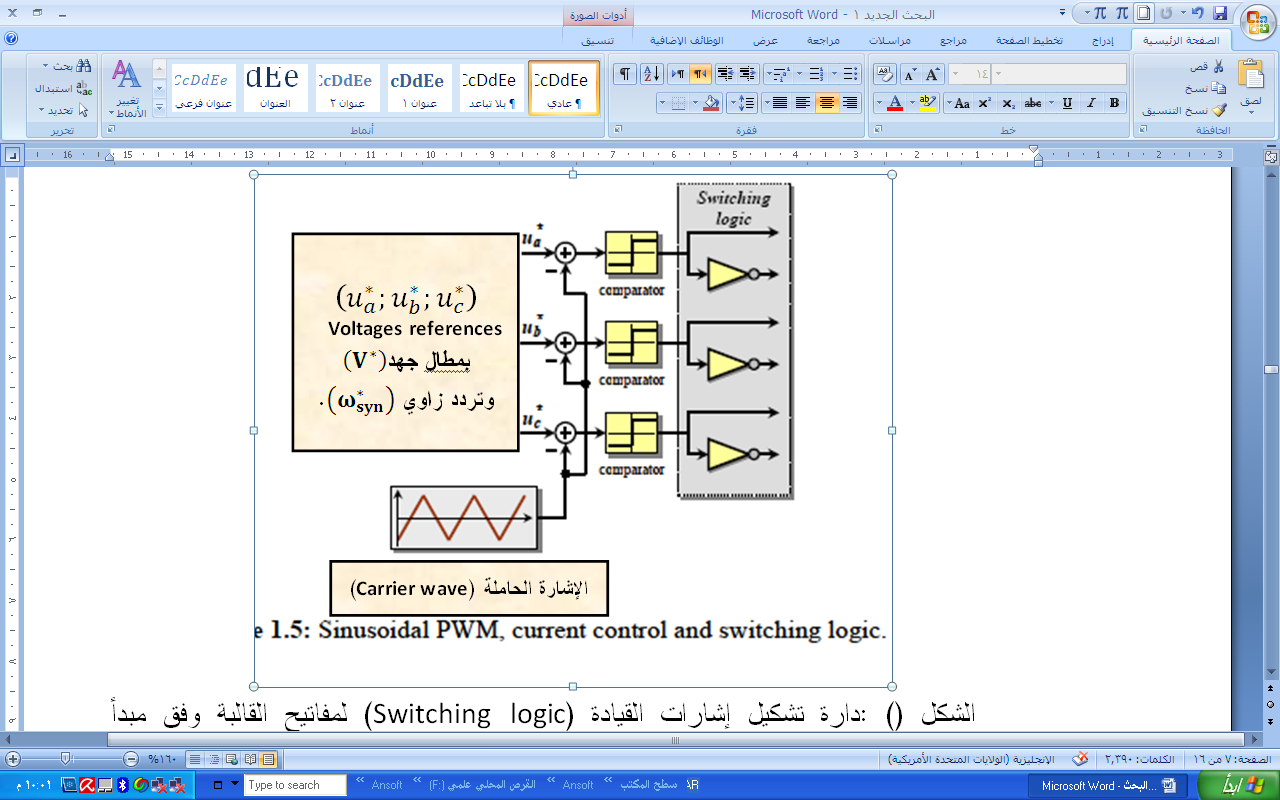
ينحصر مضمون الورقة في تقييم كفاءة ومردود نظام تحكم سلمي لقيادة محرك تحريضي ثلاثي الطور ذي دائر مقصور (Squirrel Cage Induction Motor)، يعمل في الأرباع الأربعة (four-quadrant operation)عن طريق تنظيم الانزلاق باستخدام مبدأ تعديل عرض النبضة (pulse width modulation PWM)، لقالبة جهد بترانزستورات من نوع IGBT، تعمل على تنظيم كل من التردد والجهد وفق النسبة V/F=const، والتي تتم عادة باستخدام المعالجات والمتحكمات الميكروية.
بناءً على الدراسة والتقييم للنموذج موضوع البحث, تم تحديد سلبيات نظام التحكم السابق و قمنا باقتراح إضافة حلقة تحكم بتيار دخل القالبة بهدف الحصول على خواص أداء أفضل عن طريق تخفيض الاجهادات الكهروميكانيكية الديناميكية العالية في الحالات العابرة (إقلاع - فرملة).
التنزيلات
منشور
إصدار
القسم
الرخصة
الحقوق الفكرية (c) 2021 مجلة جامعة المنارة

هذا العمل مرخص بموجب Creative Commons Attribution-NonCommercial 4.0 International License.