النموذج الرياضي لمبدأ معايرة متحكم تناسبي و تنفيذ المحاكاة باستخدام Matlab
الملخص
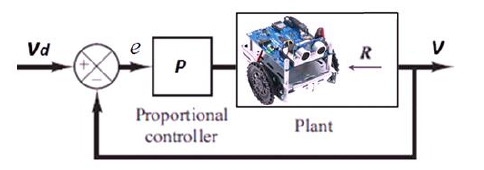
عند تصميم دارة تحكم بنظام ديناميكي فإن الخطوة الأولى هي تطوير نموذج رياضي للنظام يوضح الدخل و الخرج و طبيعة العلاقة بينهما. يمثل تابع النقل الناتج عن تطبيق تحويلات لابلاس على المعادلة التفاضلية الواصفة لديناميكا النظام نموذجاً أساسياً عند محاكاة النظم الديناميكية. في هذا المقال تم تصميم نموذج رياضي باستخدام توابع النقل لعملية التحكم بنموذج مخبري لروبوت أرضي يخضع لاستراتيجية تحكم بمتحكم تناسبي ، حيث تم تحليل شكل استجابة النظام بوجود المتحكم التناسبي ، و بناءاً على المهام الوظيفية للروبوت تم الوصول للعلاقات الرياضية لمعايرة المتحكم ، أي تحديد قيمة ثابت الكسب التناسبي الذي يحقق الشروط المطلوبة. تم تصميم كود برمجي بلغة Matlab لحساب ثابت الكسب و محاكاة سرعة الروبوت عند القيمة الناتجة للتحقق من بارمترات الاستجابة .
التنزيلات
منشور
إصدار
القسم
الرخصة
الحقوق الفكرية (c) 2022 مجلة جامعة المنارة

هذا العمل مرخص بموجب Creative Commons Attribution-NonCommercial 4.0 International License.